企业简介
驭势科技(UISEE)是中国领先的自动驾驶公司,致力于为全行业、全场景提供 AI 驾驶服务,做赋能出行和物流新生态的「AI 驾驶员」。公司成立于 2016 年,坚持立足本土研发,总部及研发中心设于北京,并在上海、浙江、深圳等地设有分支机构。
驭势科技自主研发的 U-Drive® 智能驾驶平台,拥有业界领先的算法、云端智能驾驶大脑和全功能车规级智能驾驶控制器。能够满足从 L3 到 L4 级别的多场景、高级别自动驾驶需求。2019 年,驭势科技率先在机场和工业园区实现「去安全员」的无人驾驶常态化运营突破,致力于提供「全场景、真无人、全天候」的自动驾驶技术,并逐步迈向大规模商业化应用。
项目背景
随着驭势科技在机场、厂区等场景实现规模化部署,海量无人驾驶终端在运行中持续产生高频、大容量的实时数据(如车辆状态、传感器数据及控制指令)。这些数据是云端监控、远程控车、智能调度及算法迭代的核心基础。
为支撑 L3-L4 级自动驾驶的常态化运营,驭势科技需要构建一套高可靠、高性能、易扩展的云边端一体化通信平台,以实现对海量终端的实时连接、状态监控与数据治理。
项目挑战
在构建「云脑」通信系统时,项目组面临以下核心技术挑战:
- 高并发与高吞吐
大规模无人车队需维持与云端的高频、大带宽数据通信,传统消息队列在一对多消息传递场景下资源消耗巨大,且存在单点故障风险,难以实现对车辆上下线状态的精确、实时感知。 - 云端服务高可用
云端数据处理服务需要高可用部署。采用传统的主备模式,会造成计算资源闲置浪费;采用多活模式,又容易导致数据被不同服务节点重订阅,引发逻辑混乱。 - 弱网环境稳定性
无人车主要通过移动网络与云端通信,网络抖动、信号弱等场景频发。必须确保关键控制指令与状态数据在网络不稳定时仍能可靠送达,并保障核心数据的传输实时性。 - 运维与开发成本
传统的消息中间件(如 RabbitMQ)在云边端协同场景下资源开销大,且缺乏对设备状态感知的原生支持。 - 精细化安全管理
在混合仿真测试、多租户协作等场景下,要求实现车辆、数据、权限的精细化管理与安全隔离,传统鉴权方式灵活性不足,运维复杂度高。
解决方案
核心消息骨干:从 RabbitMQ 迁移至 EMQX
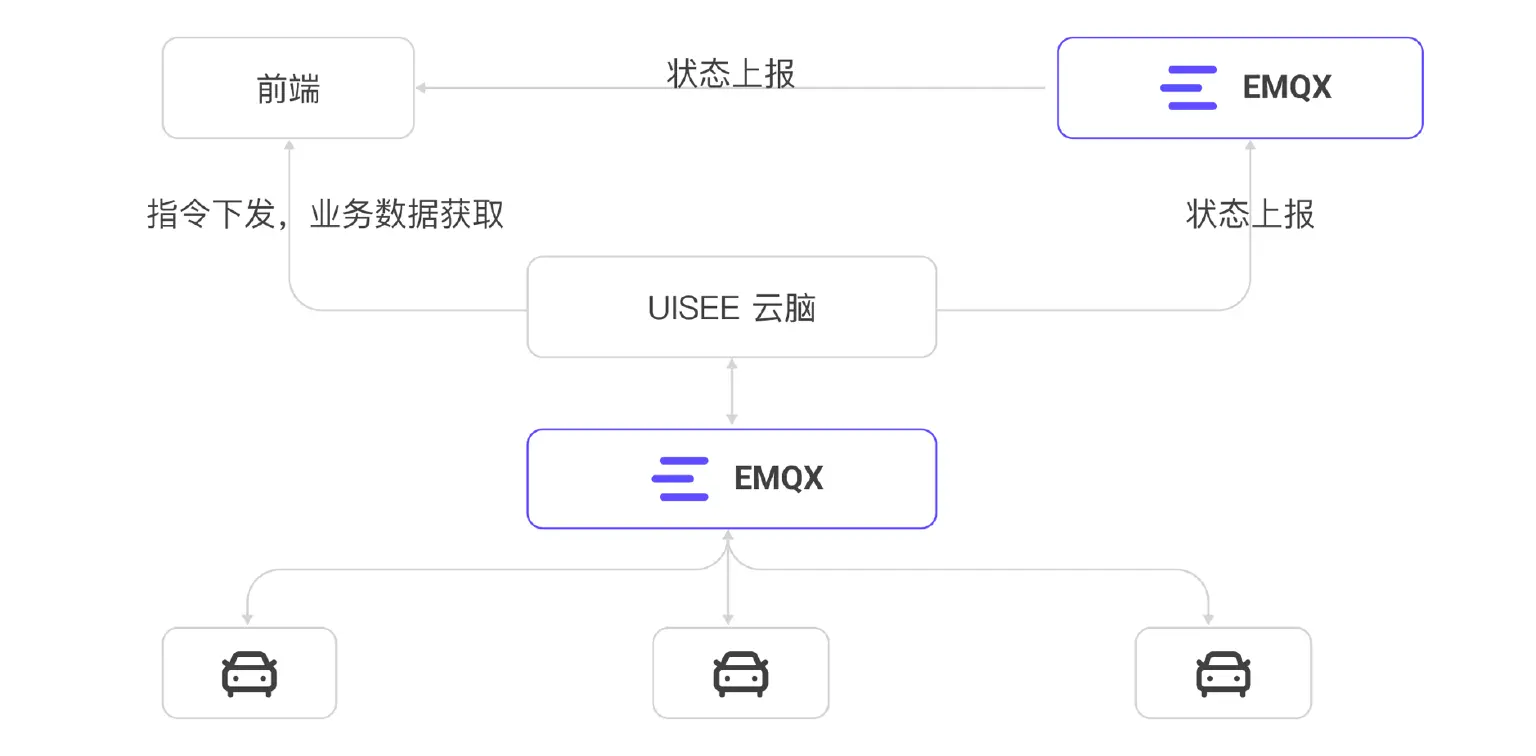
项目弃用 RabbitMQ 改用 EMQX 作为消息中间件。实测显示,EMQX 在处理无人驾驶海量连接时资源开销显著降低,稳定性更高。同时,利用 EMQX 的 SYS 系统主题,云端能实时准确地获取车辆上下线状态,解决了 RabbitMQ 在设备感知上的延迟问题。
分片高可用:基于共享订阅的负载均衡
为解决云端服务节点重复订阅及资源浪费问题,项目引入了 EMQX 共享订阅功能。通过对车辆 client_id 进行 Hash 运算,实现数据定向投递与分片高可用。这不仅保证了一台车的数据只会发送到云端的同一节点上。还能随业务规模实现云端服务的动态水平扩展。
数据高效治理:规则引擎直连数据库
针对无人车高频上报的状态信息,项目利用 EMQX 规则引擎将数据直接实时写入 InfluxDB 时序数据库。这一方案省去了中间件开发环节,在大幅降低云端资源开销与维护成本的同时,提升了数据分发与落盘的效率。
弱网环境优化:多协议切换与离线会话
针对 4G 环境下的网络波动,项目通过设置 CleanSession=false 开启持久会话,确保车辆重连后能补发离线期间的消息。在极端弱网下,系统支持自动从 TCP 切换为开销更小的 CoAP 协议,利用 EMQX 的 CoAP 插件能力确保数据准确送达。
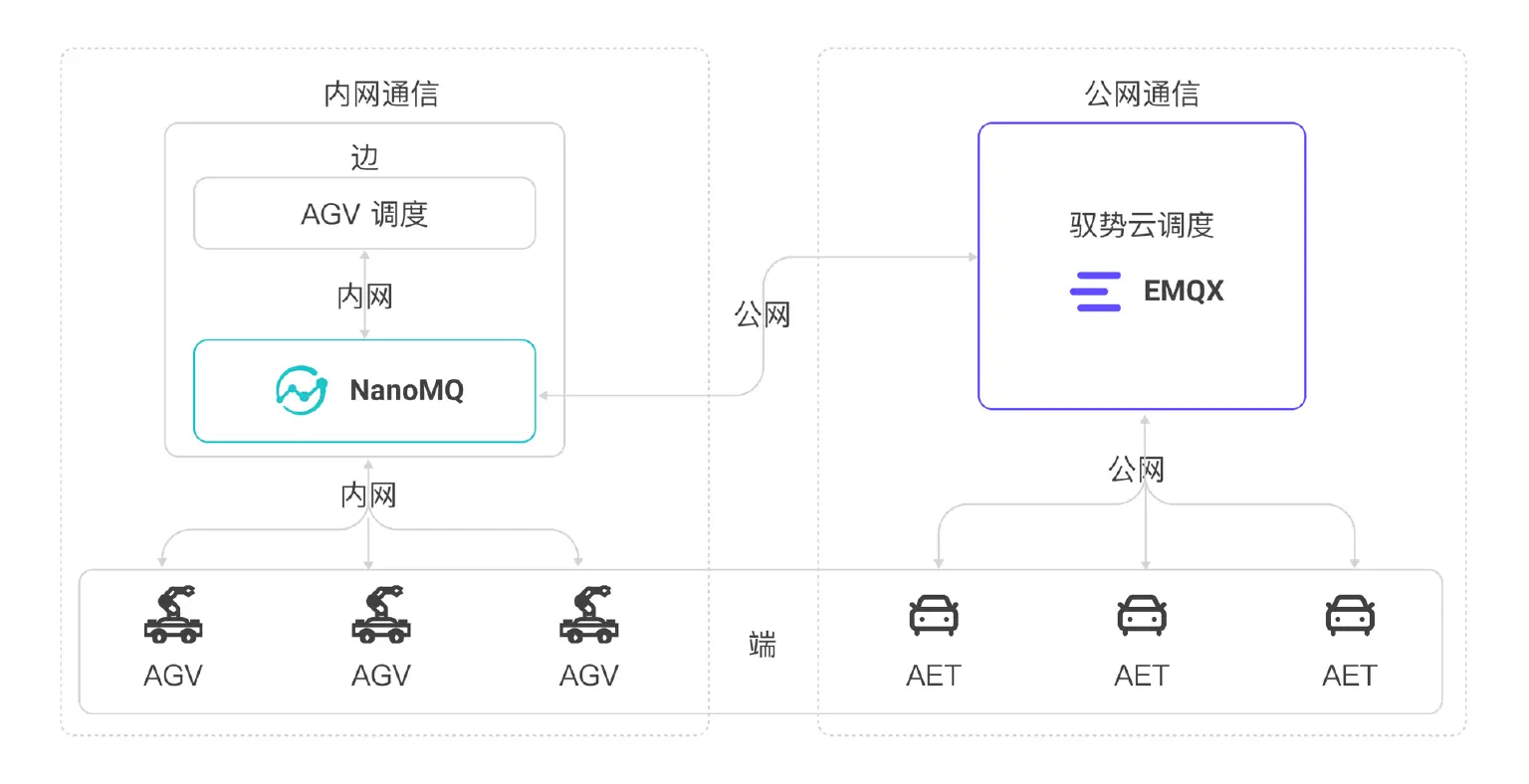
云边端协同:EMQX Edge 赋能 AGV 接入
在 AGV 调度场景中,通过部署轻量级物联网边缘 MQTT 服务器 EMQX Edge 实现边缘侧调度系统与设备的通信。EMQX Edge 向上桥接至驭势云端的 EMQX,快速构建起云边协同架构,实现了边缘局域网设备与云端平台的无缝数据互通。
安全与权限:细粒度访问控制
无人车和 EMQX 的连接采用「证书 + 账号密码」双重认证,以提高数据安全性。账号密码有专门的服务维护,可以动态更新。同时,利用 EMQX 的 ACL 权限管理,针对第三方控车平台实现精细化授权,确保跨平台交互的数据安全。
项目成果
- 高可用性保障: 驭势云脑服务整体可用性达到 99.995%,确保了无人驾驶业务的连续稳定运行。
- 研发效率突破: 借助共享订阅与规则引擎,降低了分片算法及数据处理服务的开发难度,研发效率综合提升达 30%。
- 通信质量提升: 优化了弱网环境下的传输保障,数据准达率提升了 20%。
- 架构灵活扩展: 实现了云边端一体化架构,项目部署更简单灵活,能快速适应机场、厂区等多场景的商用需求。
结语
驭势科技通过与 EMQ 的深度合作,成功构建了支撑大规模无人驾驶商业化运营的底层通信基座。未来,双方将继续探索自动驾驶在更复杂场景下的云端协同与数据智能,共同驱动 AI 驾驶服务的全球化普及。